AllskyToGo - Version 2 - mobile Allsky Kamera
Die Idee von Version 2
Nachdem ich hier meine AllSkyToGo Kamera beschrieben habe,
ist mittlerweile Version 2 der AllSkyToGo Kamera entstanden.
Die neue Version der Kamera ist etwas größer, aber immer noch mobil genug, um in einen Astrokoffer zu passen, den ich sowieso meistens mitführe. Automatische Aufnahmen und unabhängige Stromversorgung sind immer noch die Hauptanforderungen.
Da ich dieses Outdoor Paket aber noch für weitere Zwecke nutzen möchte, wurde das Ganze um eine kleine mobile Basisstation erweitert.
Ebenso erhielt die Software einige Anpasssungen und Verbesserungen.
Dieses AllskyToGo Projekt ist immer noch eines meiner Lieblingsprojekte. Warum? - weil fast alles mit einfachsten Mitteln selbst entwickelt ist und ich immer wieder fasziniert bin, was da so alles geht.
Meine Software werde ich gerne weiter zur Verfügung stellen und ich stehe auch gerne für Fragen zur Verfügung.
Die grundlegenden Anforderungen für Version 2:
|
Hardwarekomponenten:
|
Der Bastelspaß beginnt!
Die Basisstation
Bisher habe ich ein altes Handy als Hotspot genutzt und konnte darüber auf die Kamera zugreifen. Da ich nun aber etwas mehr Aufgaben erldigen will und das Ganze bequem steuerbar sein soll, hatte ich die Idee zu einer Basisstation. Hier sieht man die Basisstation im offenen und geschlossenen Zustand. Wie immer darf eine Kunststoffdose aus dem Haushaltsbereich gute Dienste leisten.
 |
 |
| Box in offenem Zustand | Box geschlossen |
In der Box befindet sich zunächst der kleine WLAN-Router. Dieser stellt einen Hotspot zur Verfügung. So ist es möglich, sich mit jedem beliebigem Gerät in diesem Netzwerk anzumelden, um die Komponenten zu überwachen und zu steuern. Die Geräte, die fest zur Basis oder zur AllskyToGo Kamera gehören, haben eine feste IP, die auch mit meinem heimischen Netzwerk abgestimmt ist. Alle anderen Geräte am Hotspot erhalten über den DHCP-Server des Routers eine dynamische Adresse im selben Netzwerksegment. Der LAN Port des Routers ist über eine IP68 Buchse nach außen geführt. Damit kann ich das ganze System zuhause per Kabel in mein Netzwerk integrieren. Dieses macht dann nicht immer zwingend eine WLAN Verbindung beim Basteln oder bei Nutzung im Bereich der heimischen LAN Anschlüsse (Outdoor) erforderlich.
Das rotschwarze Gehäuse enthält den Raspberry Pi4. (Auf die Softwareinstalltion des Raspberry OS gehe ich hier nicht weiter ein.) Dieser kann per VNC angesteuert werden und so die Systeme steuern. Einer der USB 3.0 Ports des Raspberry wird per Kabel nach außen an eine wetterfeste IP68 USB Buchse geführt. Dort können beliebige USB Geräte angeschlossen werden, die dann mit dem Raspi genutzt werden können. Vorgesehen ist dieses bei mir vor allem für den Anschluss einer Canon DSLR Kamera, welche dann für Astrofotografie genutzt werden kann. Zu diesem Zweck läuft auf dem Raspberry ein Webserver, der meine StarCatcher Software bereitstellt. Auch diese hat seit der ersten Version einige Verbesserungen erfahren und ist für mich perfekt geeignet, um einfach, schnell und problemlos Serien von Astrofotos aufzunehmen. Der USB Port kann auch genutzt werden, um Strom an andere USB Geräte zu liefern. Dieses geht aber sehr zu Lasten des Stromkontingents der Komponenten in der Box und der Powerbank.
Die grüne Powerbank hat 28600 mAh. Damit können der Raspberry und der Router problemlos 12 Stunden betrieben werden.
Weiterhin ist ein DS18B20 Temperatursensor an den Raspberry angeschlossen. Für diesen findet sich in der silbernen Dose (ehemalige Medikamentendose) ein wenig Vorschaltelektronik. Der Sensor selbst wird über eine Buchse nach außen geführt. Die StarCatcher Software hat eine Funktion zur Anzeige der Messwerte. Man kann den Sensor bei Bedarf aber auch anderweitig am Raspberry auslesen.
Für die AllskyToGo Kamera ist diese Box nicht zwingend erforderlich. Die AllskyToGo Kamera kann völlig autark arbeiten. Es genügt eine Stromversorgung und die Kamera beginnt automatisch mit den Aufnahmen. Ist die Box aber vorhanden und eingeschaltet, verbindet sich die AllskyToGo Kamera mit dem Router und es können während der Aufnahmeserien Bilder eingesehen werden und die AllskyToGo Kamera eventuell gesteuert werden, z.B. um die Belichtung anzupassen.
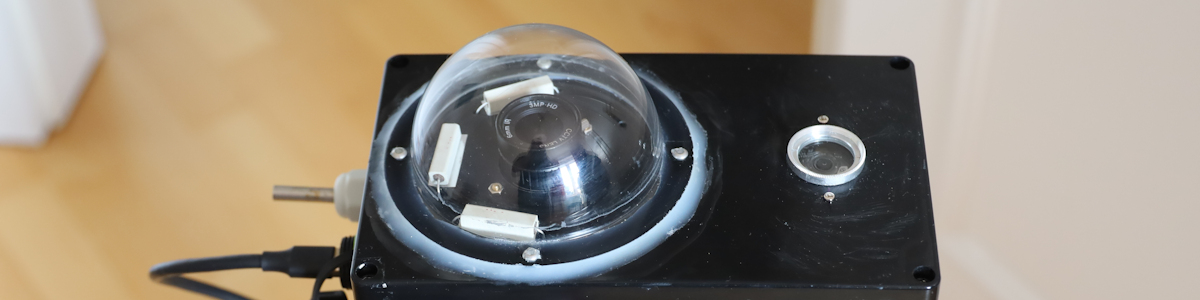
Die AllskyToGo Kamera
Während die Version 1 der AllskyToGo Kamera nur über eine Kamera (Raspberry Pi NoIR Camera Module 8MP v2 (Sony IMX219)) verfügte, bekommt die Version 2 ein zweites Auge. Es wird zusätzlich eine Raspberry Pi HQ Camera 12.3MP (Sony IMX477) mit einem CGL Objektiv 6 mm für die HQ Camera eingebaut. Beide Kameras haben einen ähnlichen FOV und damit einen ähnlichen Bildausschnitt. Da die eine Kamera keinen IR Sperrfilter hat, hat man Aufnahmen der selben Region, aber in unterschiedlichen Spektralbereichen. Ich bin gespannt, welche Unterschiede man da zukünftig erkennen kann. Da zwei Kameras und die zugehörigen Raspberry's mehr Platz brauchen, wird statt der alten Skatkartenbox als Gehäuse eine etwas größere Kiste genutzt, die schon mal Allskykamera war und die daher schon einen Acryldome montiert hat. Insgesamt werden in der Box zwei Raspberry Pi Zero 2 verbaut, damit jede Kamera über eine eigene Oberfläche separat gesteuert werden kann.
Hier ein paar Bilder des neuen Systems
 |
 |
| 1 - Außenansicht | 2 - Kameraanschlüsse |
 |
 |
| 3 - USB Buchse und Temperatursensor | 4 - USB Buchse und Temperatursensor |
 |
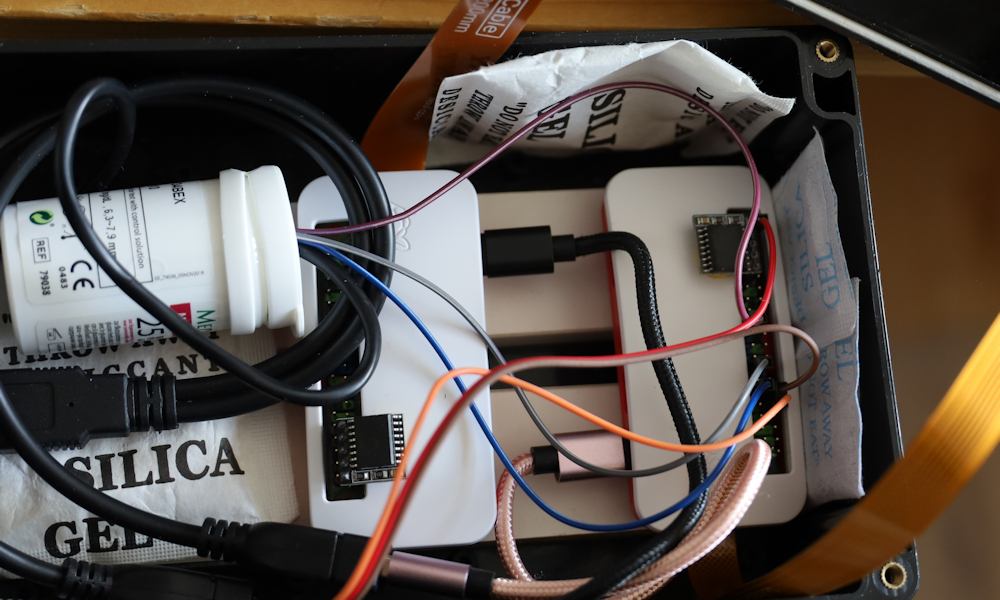 |
| 5 - Innenansicht 1 | 6 - Innenansicht 2 |
 |
|
| 7 - Kamera auf Stativ |
Der Außensensor hat wieder seine Vorschaltelektronik in der kleinen Dose. Die beiden Raspberry Pi Zero (rechts im Bild zwei weiße Gehäuse) wurden mit Klettband auf zwei Leisten (Holz/am Boden verschraubt) befestigt. Man sieht aus beiden Pi ein kleines Element mit einem Schaltkreis heraus ragen. Dabei handelt es sich um RTC Module, die auf der GPIO Leiste der Pi's stecken. Diese sind erforderlich, um Datum und Uhrzeit der Pi's aktuell zu halten. Ein Raspberry Pi Zero vergisst normalerweise ohne Synchronisation mit einem Zeitserver sein Datum und die Zeit. Hierfür wäre Netzwerk und Zeitserverzugriff erforderlich, die aber ohne Netzwerk im stand alone Betrieb nicht vorhanden sind. Die RTC Module erledigen das.
Bild 7 zeigt die Kamera, wie sie an einem beliebigen Ort aufgestellt werden kann. In der Plastiktüte befindet sich die Powerbank. Ein vollkommen unabhängiges System.
Die AllskyToGo Software und Bedienoberfläche
Grundlagen der Software
Die Software wurde von mir auf Basis meiner ersten Version vollständig neu entwickelt. Die Bedienung läuft über eine Weboberfläche. Dazu muss auf dem Raspberry Pi ein Webserver installiert sein. Eine Anleitung dazu findet sich an verschiedenen Stellen. Weiterhin werden verschiedene Softwarebausteine für den Raspberry Pi benötigt. Wesentliche Komponente dabei ist libcamera. Diese steuert auf dem Raspberry Pi die Aufnahmen mit den Raspberry Kameras. Weiter Infos dazu, findet man unter dem Link in der Raspberry Dokumentation.
Da in der Kamerabox zwei Raspberry mit je einer eigenen Kamera verbaut sind, muss die Software auf beiden Pi installiert werden. Dieses ist auch erforderlich, da die Kameras ja unterschiedliche Eigenschaften haben und demzufolge anders parametriert werden müssen. Es ergeben sich auch unterschiedliche Werte für die Einstellungen der jeweiligen Belichtungen etc. Normalerweise läuft alles automatisch. Ist die Kamerabox jedoch an die Basisstation angeschlossen, steht natürlich für jede Kamera eine eigene Oberfläche zur Verfügung, welche durch die feste IP-Adresse erreicht werden kann.
Die Aufnahmen werden normalerweise automatisch gestartet, sobald die beiden Raspberry Pi mit Strom versorgt werden und der Bootvorgang abgeschlossen ist. Dieses wird über einen CRON Job gesteuert, der die Aufnahmen startet und der in einer Endlosschleife läuft. Es gibt in der Konfiguration aber die Möglichkeit, das temporär anzuhalten, oder so einzustellen, dass der Job abgebrochen wird. Das ist sinnvoll, wenn man keine Aufnahmen machen will, sich aber mit der Software beschäftigt. Ein Beispiel hierfür ist die Anpassung der hinterlegten Parametrierung.
Ein großer Vorteil meiner Software ist, dass ich für verschiedene astronomische Dämmerungsphasen und Tageszeiten unterschiedliche Werte für die Belichtung und Steuerung der Aufnahmen hinterlegen kann. Dabei werden die Dämmerungsphasen automatisch von der Software passend für den hinterlegten Standort berechnet und die jeweils hinterlegten Parameter genutzt. Dadurch wird es möglich, in der bürgerlichen Dämmerung eine andere Beleichtung zu nutzen als z.B. in der astronomischen Dämmerung oder in der Nacht. Nach eingen Testläufen in verschiedenen Zeiten hat sich bei mir eine "Standardkonfiguration" für jede der möglichen Zeiten ergeben. Damit wird tatsächlich ein vollkommen autonomer Betrieb möglich. Hinstellen und fotografieren. Fertig!
Die Objektive der beiden Kameras wurden vor dem Einbau auf unendlich fokussiert. Normalerweise sollte sich die Fokuslage nicht mehr ändern.
Die Software und ihre Oberflächen und Parameter
Bei der Beschreibung der Software wird jetzt immmer nur von einem Raspberry die Rede sein. Auch wenn in der Kamerabox zwei Pi stecken, ist die Oberfläche und Funktionalität für beide gleich. An Stellen, wo es Bezüge zur jeweils anderen Kamera gibt, werde ich darauf hinweisen. Die Software für die Aufnahmen startet automatisch, sobald die beiden Raspberry Pi mit Strom versorgt werden und der Bootvorgang abgeschlossen ist. Dieses wird über einen CRON Job gesteuert, der die Aufnahmen startet und der in einer Endlosschleife läuft. Es gibt in der Konfiguration aber die Möglichkeit, das temporär anzuhalten, oder so einzustellen, dass der Job abgebrochen wird. Das ist sinnvoll, wenn man keine Aufnahmen machen will, sich aber mit der Software beschäftigt. Der Job benutzt die zuletzt hinterlegten Parameter. Werden danach zur Laufzeit des Jobs Parameter geändert, werden die spätestens nach der nächsten Schleife wirksam. Die aufgenommenen Bilder landen im Home Directory (Unterverzeichnis AllSkyToGo) des aktuellen Users in einem Verzeichnis mit dem aktuellen Datum als Namen. Die Bilder selbst haben den üblichen "Datum_Zeit" Stempel als Namen. Zusätzlich wird die ermittelte Dämmerungsperiode an den Namen angehängt. Die Bilder können per FTP heruntergeladen werden. Alternativ ist auch eine Verarbeitung oder auch das Löschen direkt auf dem Raspberry Pi via VNC möglich.
Als Encoding stehen über die Konfiguration die folgenden Typen zur Verfügung: ['jpg', 'png', 'bmp', 'rgb','yuv420']. Die Dateien werden entsprechend codiert und die Dateiendung angepasst. Verzeichnisse für die Software und die Daten generiert das System bei Bedarf automatisch.
Die Software arbeitet normalerweise im Hintergrund ohne Ausgaben zu erstellen. Dabei werden aber Protokolle über den Verlauf erstellt. Ist der Raspberry Pi an ein Netzwerk/Hotspot angeschlossen, kann über den laufenden Webserver auf den Pi und die Oberflächse zur Konfiguration zugegriffen werden. Dazu ruft man http://IP-des-Servers/AllSkyToGo in einem Browser auf. Die Startseite sieht wie folgt aus:
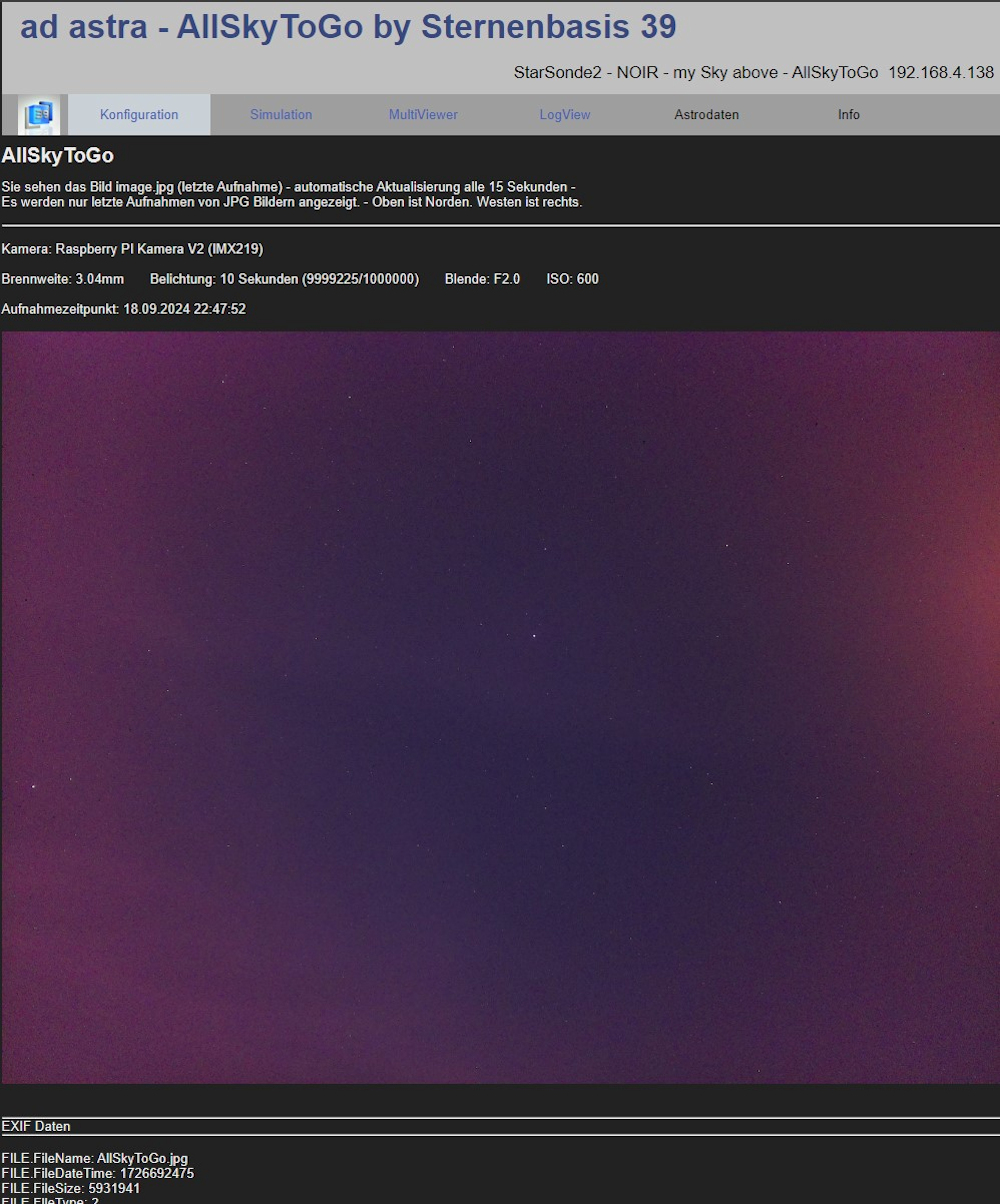
Aufnahme einer NoIR Kamera in der Großstadt bei hoher Lichtverschmutzung.
Hier wird das aktuell letzte aufgenommene Bild (nur JPG) angezeigt und einige Informationen dazu. Die Anzeige wird automatisch aktualisiert, so dass man den Verlauf der Aufnahmen verfolgen kann. Über das Menüsystem können die weiteren Funktionen angesteuert werden.
Konfiguration
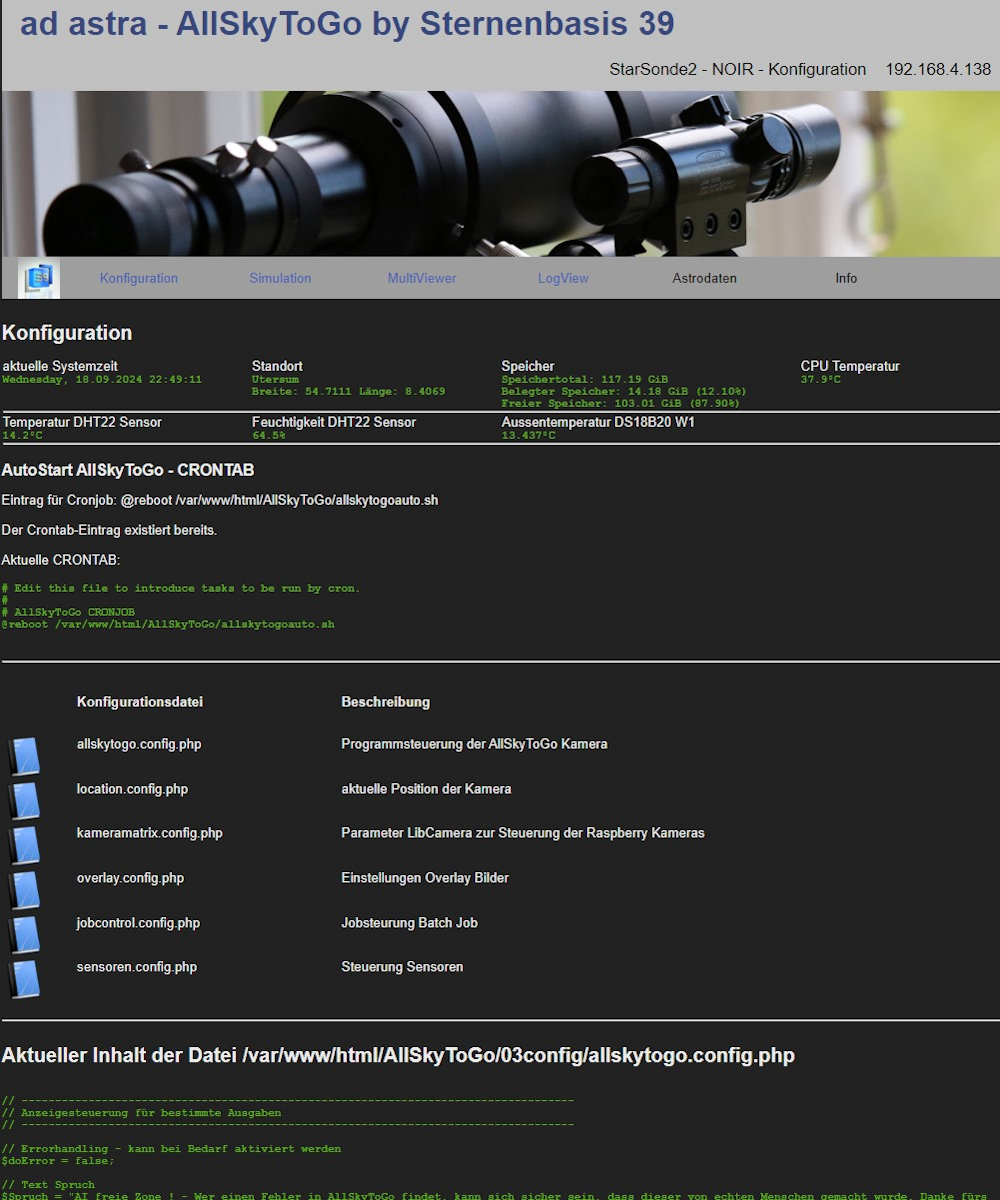
Auf der Konfigurationsseite werden im oberen Bereich die aktuelle Systemzeit, der verwendete Standort, Informationen zum Speicher und die aktuelle CPU Temperatur angezeigt. Sofern Sensoren am Raspberry angeschlossen sind, werden die Messwerte angezeigt. Im Screenshot oben sind ein DHT22 Temperatur- und Feuchtesensor im Gehäuse und ein Außentemperatursensor (DS18B20) angeschlossen.
Als Nächstes folgen Informationen zum Autostart in der CRONTAB. Der Eintrag wird automatisch gesetzt, wenn die Parameter in der Datei jobcontrol.config.php geändert und gespeichert werden.
Danach werden die Konfigurationsdateien aufgelistet, in denen die jeweiligen Einstellungen angepasst werden können. Diese werden nun im einzelnen erläutert. In der Regel sind in den Dateien Kommentare enthalten, die alle Einstellungen beschreiben. Die Parameterdateien sind in PHP Sysntax verfasst und können angepasst werden. Ich vertraue ein wenig auf das "Nerd-Gen" der Anwender. Eine Datei kann bearbeitet werden, indem auf das Buch-Symbol vor dem Dateinamen geklickt wird. Unterhalb des Dateiübersichtsbereiches werden die aktuellen Konfigurationen gelistet. Die Dateien werden im Einzelnen beschrieben. Kommentarzeilen in den Dateien ist ein doppelter Slash // voranzustellen. Die gesamte Konfiguration ist eigentlich schon recht gut abgestimmt, es wird aber immer ein wenig individuellen Feinschliff benötigen.
allskytogo.config.php
Die wichtigsten Parameter in der Datei sind die Folgenden. Eine Erklärung findet sich jeweils dazu.
// -----------------------------------------------------------------------------------
// Anzeigesteuerung für bestimmte Ausgaben
// -----------------------------------------------------------------------------------
// Errorhandling - kann bei Bedarf aktiviert werden
$doError = false;
// Text Spruch
$Spruch = "AI freie Zone ! - Wer einen Fehler in AllSkyToGo findet, kann sich sicher sein, dass dieser von echten Menschen gemacht wurde. Danke fürs Verständnis.";
// -----------------------------------------------------------------------------------
// Steuerung Programmfunktionen
// -----------------------------------------------------------------------------------
// Der Name des Rechners auf dem AllSkyToGo läuft
$Rechnername = "MiniPi - ";
// Autostart generell aktiv/konfigurierbar
// Wenn true wird in der Crontab ein Eintrag angelegt, wenn er nicht vorhanden ist.
// Wenn false wird der Eintrag entfernt, wenn er vorhanden ist, dass Ganze passiert in der konfiguration.display.php
// Der angelegte CRONTAB Eintrag führt dazu das nach 90 Sekunden "pkill gvfsd-gphoto2" ausgeführt wird.
// Damit werden DSLR Kameras nicht mehr automatisch gemounted
$autoStartAllSkyToGo = true;
// AllSkyToGo Crontab-Eintrag
$AllSkyToGoCronJob = "@reboot ".$wwwpfad."allskytogoauto.sh";
// -----------------------------------------------------------------------------------
// Standartwerte für einige Parameter
// -----------------------------------------------------------------------------------
// Standard Objektname
$stdObjektname = "AllSkyToGo";
// Datei auf dem internen Webserver ablegen
$copyToWebServer = true;
// auch die Datei unter dem original Namen kopieren
$WebServerFileNameOriginal = false;
// Refreshtime spezial wenn 0 wird es nicht berücksichtigt andere Werte ändern den Refresh der Index Seite
$refreshTimeSpezial = 0;
location.config.php
In dieser Datei werden die Koordinaten des Standortes hinterlegt. Diese werden für die Berechnung der astronomischen Dämmerungsphasen genutzt.
Das geschieht in der folgendnen Form, wobei nicht benötigte Werte auskommentiert werden sollten. So kann man mehrere Standorte nutzen.
// Werte für Utersum
$aktuellerStandort="Utersum";
$breitengrad=54.7111;
$laengengrad=8.4069;
kameramatrix.config.php
Die Kameramatrix enthält die technischen Informationen ebenso wie die Aufnahme- und Belichtungsparameter.
Im Einzelnen sind dieses:
- // angeschlossene Raspberry Pi Kamera
- // Beschreibungen aller Raspberry Kameras
- // technische Daten der Kameras
- // width maximale Breite des Bilds in Pixel
- // height maximale gewünschte Höhe des Bilds in Pixel
- // gain maximaler digitaler gain ... korrespondiert zu anlogem GAIN = ISO
- // autoFocus Kamera unterstützt einen Autofocus
- // FocalRatio Blende
- // FocalLength Brennweite
- // Kameraformate für Bilder
- // Gain Werte für Auswahlboxen
- // Encoding Informationen
- // JPEG Qualität
- // Steuerung Vorschau und Meldungen
- // Aufnahmmeverzögerung
- // Autofocus on Capture
- // Autofocus Mode -Specify the autofocus mode
Kernstück dieser Konfiguration ist die BelPhasen Matrix. Diese steuert entweder initiiert durch die jeweilige aktuelle Stunde oder durch die astronomische Dämmerungsphase die Belichtung. Dabei wird für jede Phase ein Array hinterlegt, das die folgenden Elemente enthält:
- Automode - Aufnahmen automatisch durch Kamera oder mit hinterlegten Werten
- Gain
- Shutter
- AWBGain
- Wartezeit zwischen zwei Aufnahmen
- Metering
Ein typischer Satz für z.B. eine Tageszeit und die Nacht könnte dann so aussehen:
$BelPhasen['daytime10'] = ['AutoMode' => "ON", 'Gain' => "1", 'Shutter' => "8000", 'AWBGain' => "0,0", 'Wartezeit' => "60", 'Metering' => "centre"];
$BelPhasen['night'] = ['AutoMode' => "OFF", 'Gain' => "9", 'Shutter' => "30000000", 'AWBGain' => "0,0", 'Wartezeit' => "10", 'Metering' => "centre"];
overlay.config.php
Die aufgenommenen Bilder können mit einem Overlay mit Text und Informationen versehen werden. In dieser Datei kann das entsprechend konfiguriert werden. Hinweis: Wird eine Bilddatei mit einem Overlay versehen, werden dabei die EXIF Daten gelöscht, da das Bild ohne die Original EXIF Daten neu geschrieben werden muss.
jobcontrol.config.php
Die Angaben in dieser Datei steuern den Job und die Ausgabe auf der Seite "Multiviewer"
// Den Batch Job temporär anhalten - Es wird dann alle 60 Sekunden geprüft, ob es weiter gehen kann - bei false geht es weiter
$JobOnHold = false;
// Den Batch Job abbrechen
$JobCancel = false;
// Multiview Auf der Seite Multiview können Aufnahmen von verscheidenen Quellen in einer Übersicht angezeigt werden.
// Di ersten beiden sind in der Regel die beidne in meiner AllskyToGo Kamera eingebauten Kameras
// Die Parameter werden hier n der Konfiguration beschrieben.
$MView = [];
$MView['0'] = ['BildLink' => 'http://IP/AllSkyToGo/AllSkyToGo.jpg', 'Kamera' => 'Raspberry PI HQ Kamera (IMX477)', 'Unit' => 'AllSkyToGo Kamera - Sonde 1'];
$MView['1'] = ['BildLink' => 'http://IP/AllSkyToGo/AllSkyToGo.jpg', 'Kamera' => 'Raspberry PI Kamera V2 (IMX219)', 'Unit' => 'AllSkyToGo Kamera - Sonde 2'];
sensoren.config.php
In der Sensoren Konfiguration können Parameter für angeschlossene Sensoren hinterlegt werden. Auf eine Erläuterung wird hier verzichtet.
Simulation
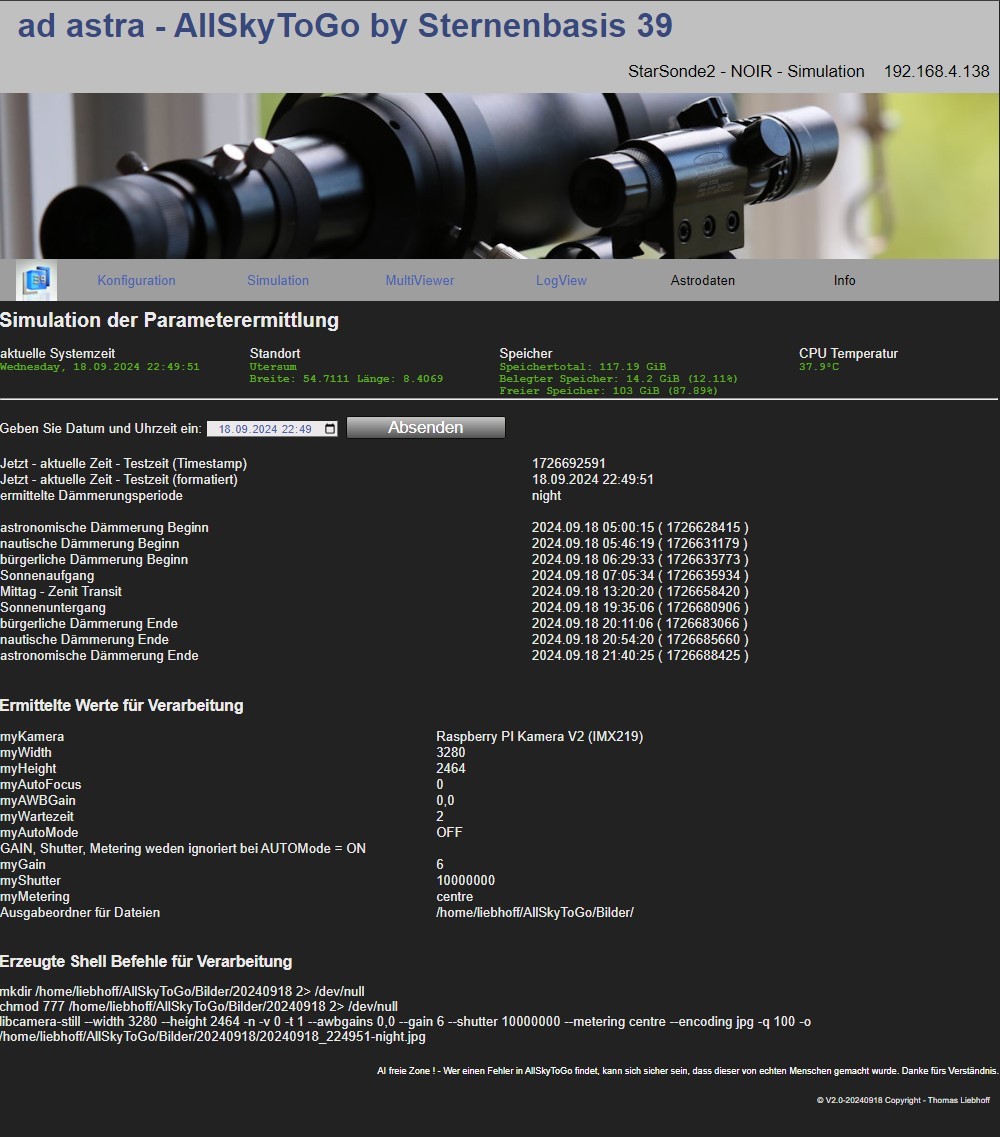
Die Simulation diente eigentlich ursprünglich dazu, die Arbeit des Programms zu testen und festzustellen, was für die Aufnahme aufgrund der hinterlegten Parameter ermittelt wurde. Mittlerweile kann die Funktion gut genutzt werden, um eigene Konfigurationen zu finden und zu überprüfen.
Nach Eingabe eines Datums und einer Uhrzeit führt die Simulation die selben Berechnungen durch, wie sie im eigentlichen Aufnahmeprogramm ausgeführt werden. Es werden dann die Dämmerungsphase und die ermittelten Kameraeinstellungen und Aufnahmeparameter angezeigt. Für einen Test des libcamera Befehls kann dieser kopiert und in einem Terminalfenster zum Test ausgeführt werden.
Multiviewer
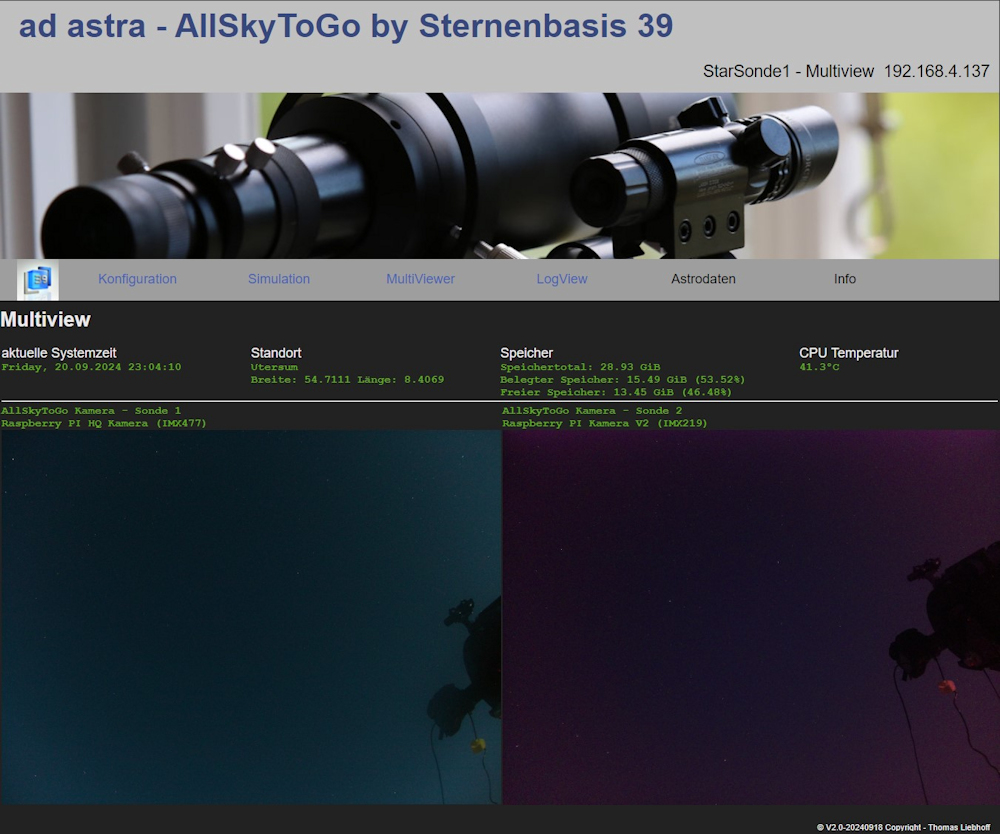
Bei zwei Kameras, die auf je einem Raspberry Pi mit eigener Weboberfläche laufen, ist es im Betrieb lästig, immer zwischen verschiedenen Fenstern oder TABS hin und her zu wechseln. Daher wurde der Multiviewer geschaffen, der die Bilder der beiden verbauten Kameras auf einer Seite anzeigt. Die Bildlinks sind in der Jobcontrol hinterlegt.
LogView

Das Programm schreibt im laufenden Betrieb verschiedene Protokolle. Diese werden auf dieser Seite aufgelistet und können eingesehen werden.
Menüpunkte Astrodaten & Info
Unter den Punkten Astrodaten und Info findet man Links zu:
- Den ermittelten täglichen Dämmerungsperioden
- Eine Info zu Sonne und Mond (nur bei aktiver Internetverbindung)
- Einer Wetterstation auf Föhr (nur bei aktiver Internetverbindung)
- Eine Info zum PHP Server des Raspi
- Den Seiten Kontakt und Impressum, Datenschutz
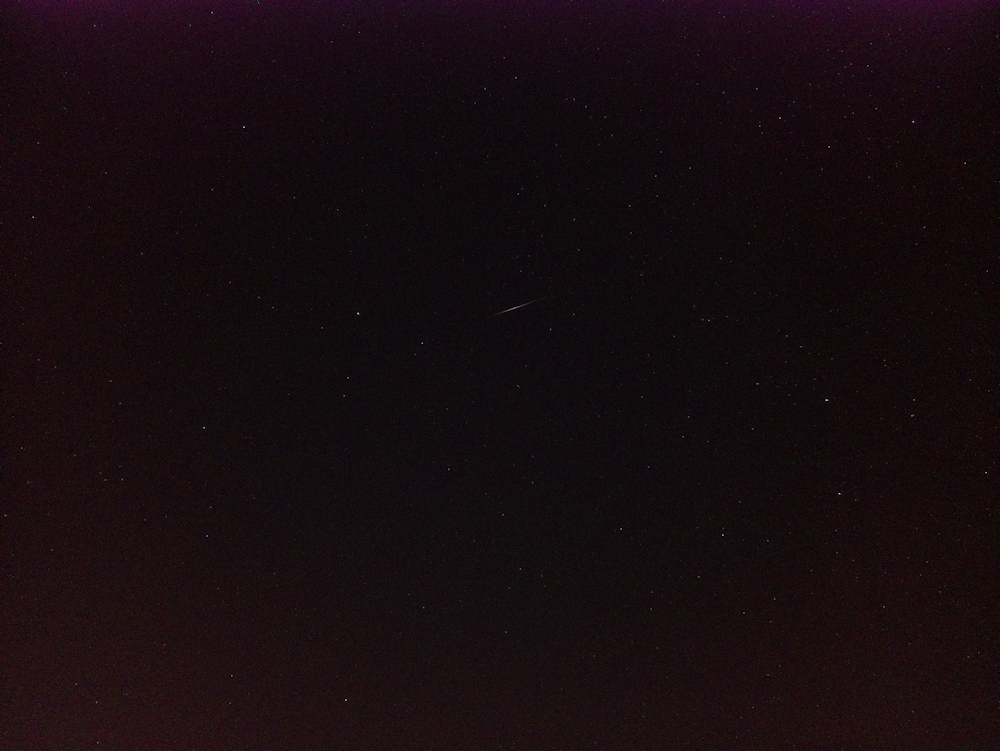
Beispielaufnahmen
| 1 - Aufname ohne IR Filter | 2 - normale Nachtaufnahme etwas überbelichtet wegen Mond |
 |
 |
3 - Aufnahme in der Polarlichtnacht vom 15.10.2024 |
4 - Aufnahme in der Polarlichtnacht vom 15.10.2024 |
 |
 |
5 - NoIR Aufnahme Polarlichtnacht vom 15.10.2024 |
6 - NoIR Aufnahme bei Lichtverschmutzung in Schwerin |
 |
 |